Current WeBR Lab research thrusts are broadly in the design of robots, controllers, and devices to rehabilitate, assist, or augment motor function and communication.
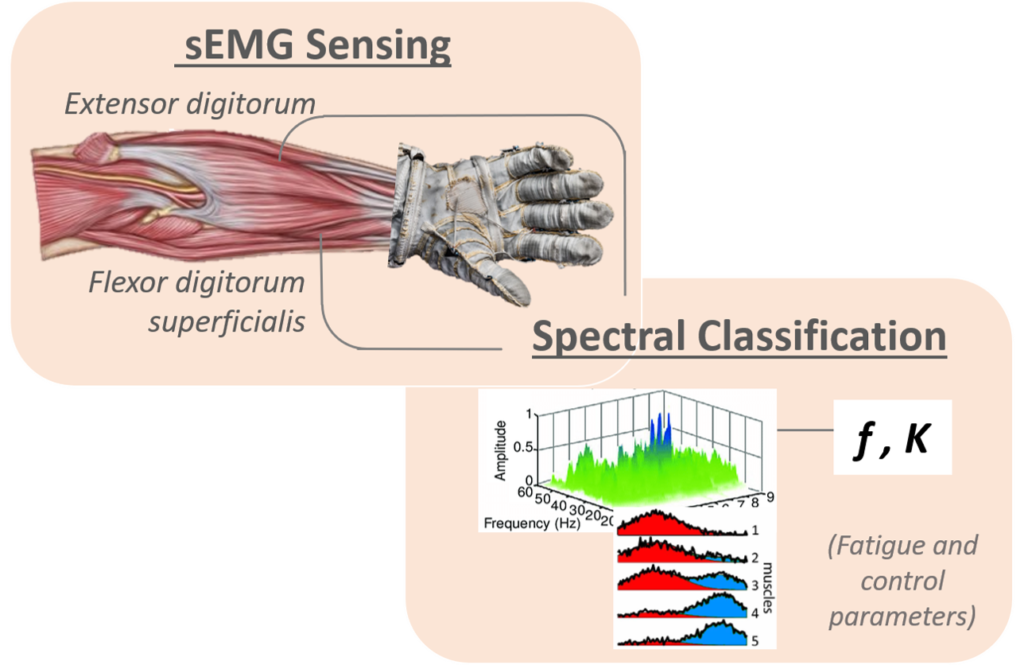
Electromyographic Control
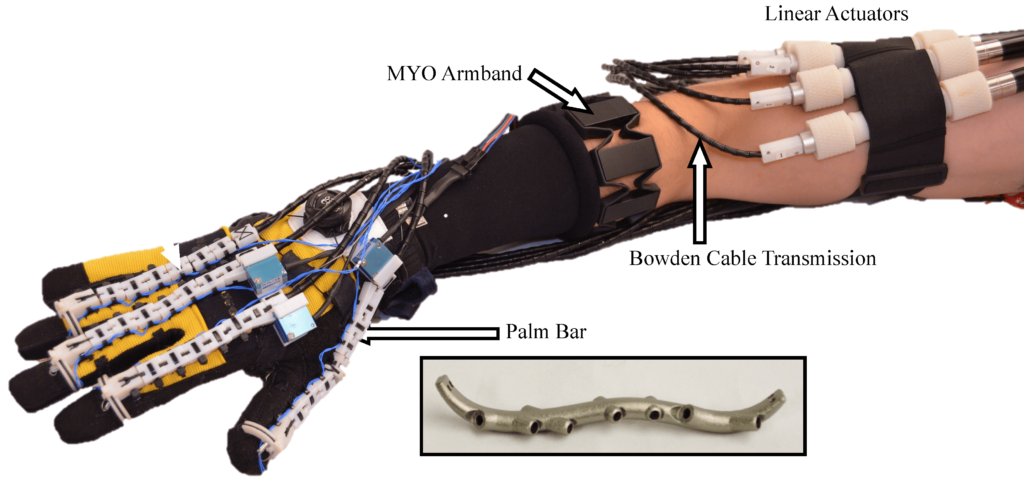
- Intent Detection and Fatigue Compensation of glove-based exoskeletons
- Intent Detection for low-cost prosthetics
Rehabilitation and Assistive Robotics
- Impact of Gravity Compensation on upper extremity movement
- SPAR Glove – assistive exoskeleton
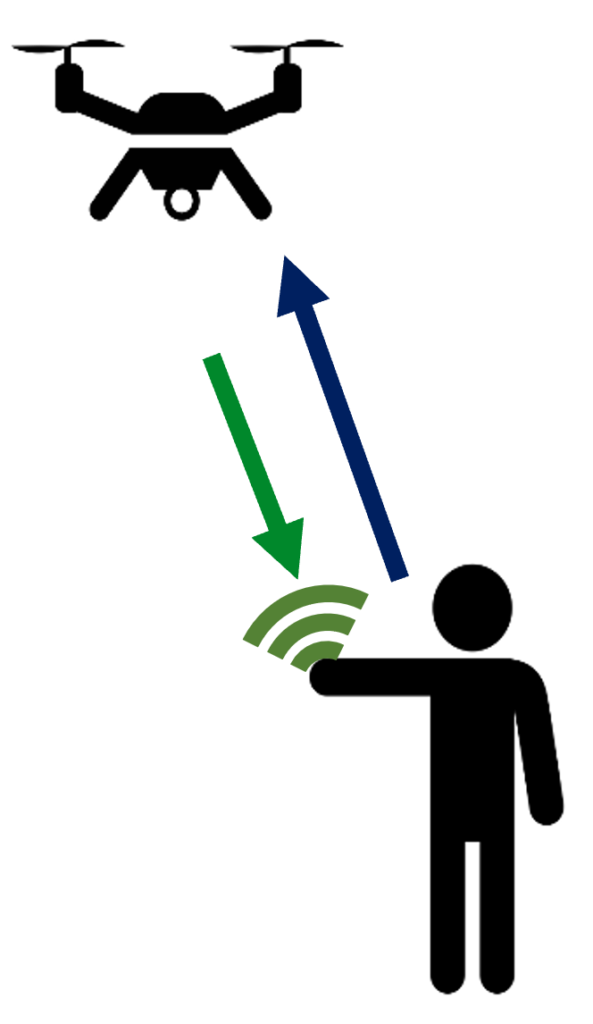
Human-Robot Interaction and Haptics
Biomechanical and Motion Assessment
- Estimation of finger joint impedance properties
- IMU-based gait measures

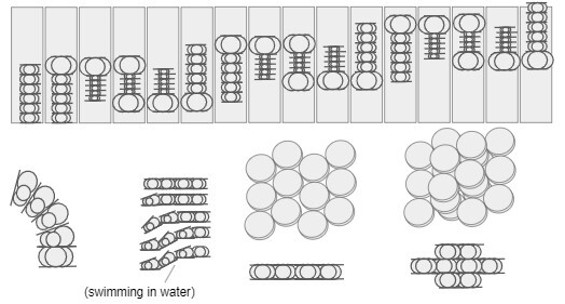
Soft Robot Manipulation and Locomotion
- Low-cost, open-source haptic paddle
- Provides hands-on STEM experiences for middle and high school students.
- GitHub Resources (CAD, instructions, bill of materials)

